
カーネギーメロン大学ロボットメカニクスラボで博士課程に在籍するポール・ナダン氏は、ユニークな発想で「ロボットを実験室から現実世界へ」送り出す研究に取り組んでいます。
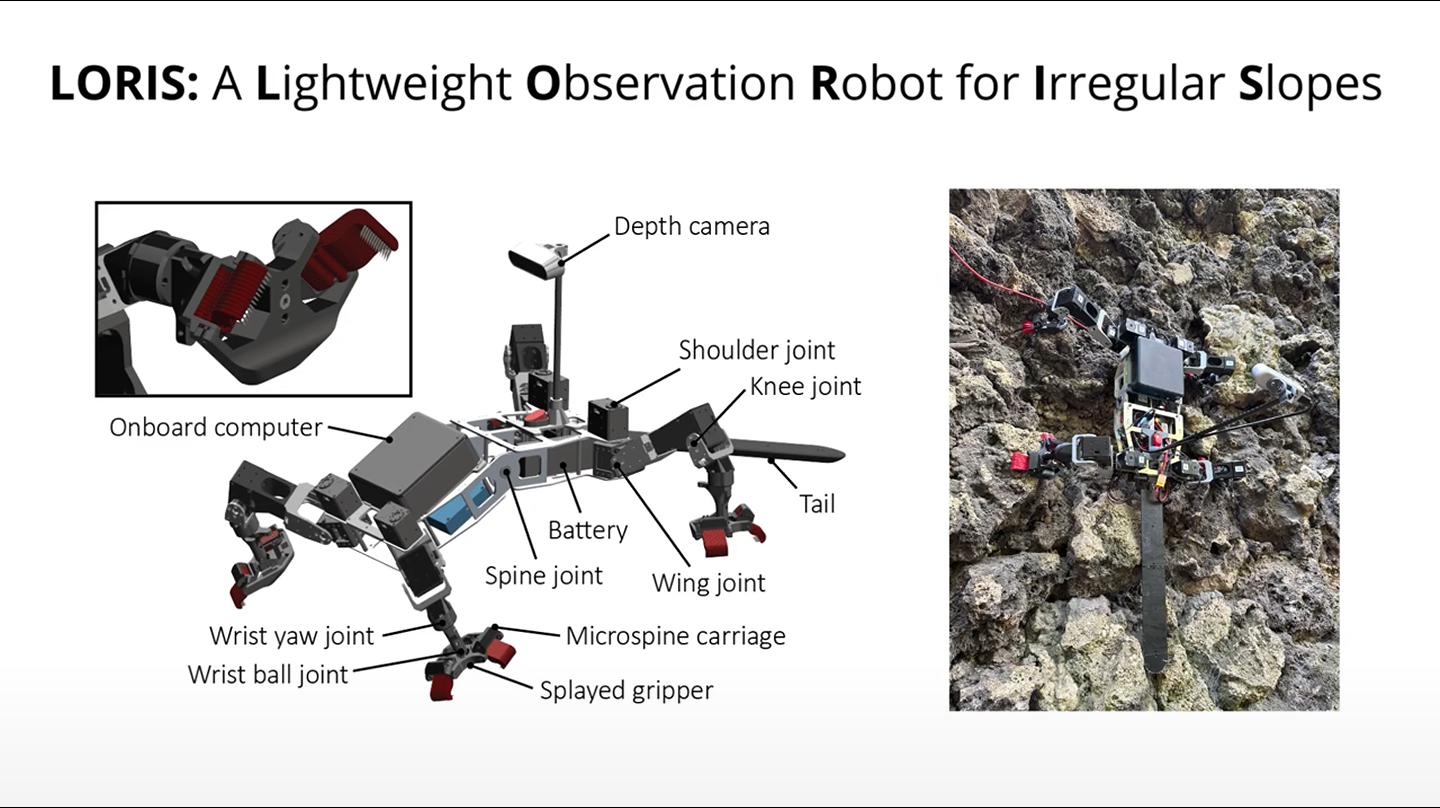
その成果の一つが、険しい崖や洞窟の岩壁を登る小型ロボット 「Loris(ロリス)」 です。
名前の由来は、木を慎重に登る小型霊長類のロリス。
この生物が持つ「ゆっくり・確実に登る」特性を工学的にロボットへ投影した存在です。
ロボットの最大の壁:接触の難しさ
多くのロボットは、平坦な床や整備された環境では問題なく動作します。
しかし、自然界や都市インフラの現場に出ると、「どのように環境と接触し、安定を保つか」という課題に直面します。
滑らかな表面や予測不能な突起、傾斜角度の大きい斜面などは、従来の車輪型・脚型ロボットにとって大きな制約でした。
Lorisが挑むのはまさにこの「接触の自由化」。
岩壁や崖を登れることは、単なる技術的デモンストレーションではなく
「ロボットが本当に人類のフロンティアで役立つかどうか」を試す重要な試金石となります。
マイクロスパイン:自然に学んだ特殊なグリップ機構
Lorisの足先にはマイクロスパイン(微細なフック)と呼ばれる仕組みが備わっています。
これは岩肌に存在する微小な凹凸へ物理的に引っ掛かることで、ロボットを支える方式。
吸盤のように真空を必要とせず、磁石のように対象材質に制限されることもありません。
特筆すべきは、スパインが90度に組み合わされた二重構造になっている点です。
これにより、垂直方向だけでなく横方向の力も吸収でき、より安定した登攀が可能となります。
これは単なる材料技術ではなく、「ロボットが多方向の力をどう受け止めるか」という設計哲学の結晶ともいえます。
生物模倣と工学設計の融合
このロボットは、生物の進化をヒントに設計されています。
- ロリス(霊長類):慎重でゆっくりした動き → 安全第一の動作パターン
- ヤモリ・トカゲ:足の内向きの力を利用して安定性を確保 → 脚間で力を掛け合う設計へ
- ゴキブリ:脚のトゲ構造 → マイクロスパインの発想
このように、「異なる生物の適応戦略を組み合わせる」アプローチが、従来の工学単独の設計では得られなかった性能を生み出しています。
尾が生み出す安定性と軽量化の鍵
Lorisの背後には尾があり、これは単なる装飾ではなく「てこの支点」として重要な役割を果たします。
尾を壁に押し付けることで、ロボットが後方に倒れこむのを防ぎ、必要な接着力を減らせます。
さらに大きな特徴は、受動的なグリッパー。
モーターで締め付ける必要はなく、脚の動きから自然に発生する内向きの力で壁をつかみます。
これにより余分なモーターや重量を削減し、小型化・省エネ化を実現しました。
ロボット工学の大きなテーマである「軽さ」と「頑丈さ」の両立に挑戦しているのです。
宇宙探査での活躍を想定
この研究の最大のゴールは、宇宙探査への応用です。
これまでの火星探査車(ローバー)は平地や緩やかな斜面で大きな成果を挙げましたが、崖や洞窟、溶岩トンネル内部までは立ち入れません。
Lorisのような登攀ロボットが実用化されれば、以下のようなミッションが現実味を帯びます。
- 急斜面に露出した地層を観測し、惑星の地質史を解明
- 地下洞窟に侵入して、生命の痕跡や水の存在を探索
- サンプルを回収してメインローバーに届ける
これは単なるロボットの進化ではなく、人類の知識圏を広げる新しい科学的インフラになり得るのです。
自律登攀への挑戦
現状の研究課題は、自律的な経路計画と足場選びです。
Lorisは深度カメラで地形を三次元的に把握し、その情報を基に「どこに足を置くべきか」を判断します。
サンプルベースの経路プランニングにより、安全かつ効率的なルートを自分で選び取れるよう開発が進められています。
これは単なる「崖登りロボット」から「知的探査エージェント」へと進化するためのステップです。
Lorisが示す「ロボットの未来像」
私が特に注目するのは、この研究が 「機械と環境の相互作用」 に重点を置いている点です。
AIや制御技術の進化が話題になりがちな現代ですが、実際にロボットを現場へ出すには「物理的な世界をどう攻略するか」が避けて通れません。
- 軽量化と受動機構 → 資源制約下の宇宙でも運用可能
- 生物模倣の設計 → 工学的合理性を超える発想の源泉
- 不整地適応 → 災害救助、建設、地球環境調査にも転用可能
つまりLorisは「宇宙用クライミングロボット」にとどまらず、将来的には地球上でも多用途に使える可能性を秘めています。
たとえば、被災地の崩落現場での調査、山岳救助での情報収集、インフラ点検などです。
まとめ
Lorisは、カーネギーメロン大学の研究者たちが生物の知恵と工学を融合させた成果であり、「ロボットがどこまで現実世界に適応できるか」を示す挑戦そのものです。
もしこの技術が実用化されれば、人類はこれまで立ち入れなかった断崖や洞窟を探索でき
宇宙科学は新たなフェーズへ突入するでしょう。
「ロボットは環境を征服するのではなく、環境に寄り添って適応する」
Lorisの研究は、その未来を指し示しています。
コメント
コメント一覧 (4件)
the best adult generator interactive ai chat 18+ create erotic videos, images, and virtual characters. flexible settings, high quality, instant results, and easy operation right in your browser. the best features for porn generation.
сервис mail рассылка сервисы создания емейл рассылок
Hello guys!
I came across a 153 awesome page that I think you should browse.
This tool is packed with a lot of useful information that you might find interesting.
It has everything you could possibly need, so be sure to give it a visit!
[url=https://crickwick.com/what-is-ptsd-and-what-to-do-about-it/]https://crickwick.com/what-is-ptsd-and-what-to-do-about-it/[/url]
And don’t forget, everyone, which you at all times can within this piece locate solutions to your most tangled queries. The authors attempted to lay out all data via the most very accessible method.
Hello everyone!
I came across a 153 very cool platform that I think you should dive into.
This tool is packed with a lot of useful information that you might find valuable.
It has everything you could possibly need, so be sure to give it a visit!
[url=https://www.bazaaretcompagnie.com/15815/methodes-gagner-paris-sportifs-basketball/]https://www.bazaaretcompagnie.com/15815/methodes-gagner-paris-sportifs-basketball/[/url]
And remember not to neglect, folks, which you at all times may inside this article discover answers for the most the very complicated questions. We attempted to lay out all information using an extremely understandable way.